Vertical caving terminology and methods > Prusiking systems, prusiking methods > Step or rope walking systems, sit on the heels systems
One of the earliest systems for prusiking, which is based on stepping. It has been discredited due to its lack of safety features, and clumsy arrangement. However, it remains in use by American climbers, in spite of its problems. The legs perform most of the work and the arms are each used for moving an ascender upwards. The steps are much smaller than many other step systems, and the gain feels very limited considering the effort. Originally intended for use with prusik loops.
Passing rebelays, deviations and knots, and reverse prusiking is fairly similar to the frog system, fairly easy compared with some other systems. However, there are no other significant benefits to this system. It is particularly awkward for bottom weighting, since the feet move separately and cannot trap the rope, and the hands are also occupied and cannot pull the rope through the lower top jammer without letting go of the top jammer. The only remaining option is to push the cam open of the lower jammer, but this really is very fiddly. Mid-rope changeovers are very easy. The arrangement of the top jammers allows only a very slight range of motion for each movement, so although the energy transfer efficiency is not terrible, it requires a lot of movement for very little gain, and there is a significant risk of fingers being trapped between the ascenders. The original version had no resting position, and nothing to catch you if your foot slipped out of the footloops, but the safety cords mitigate both of those problems. Taking a rest then requires one leg to be bent or taken out of its footloop, so that one top jammer can be lifted. Can be tiring for the arms on long pitches.
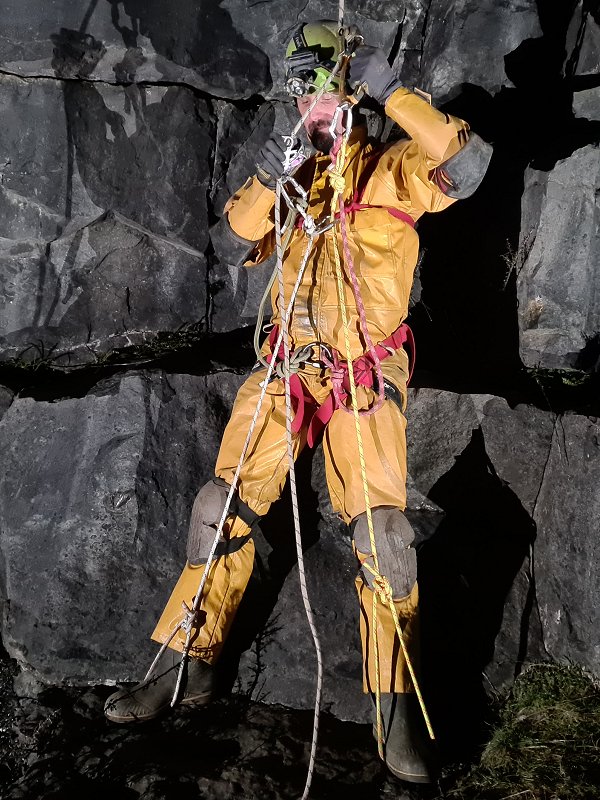
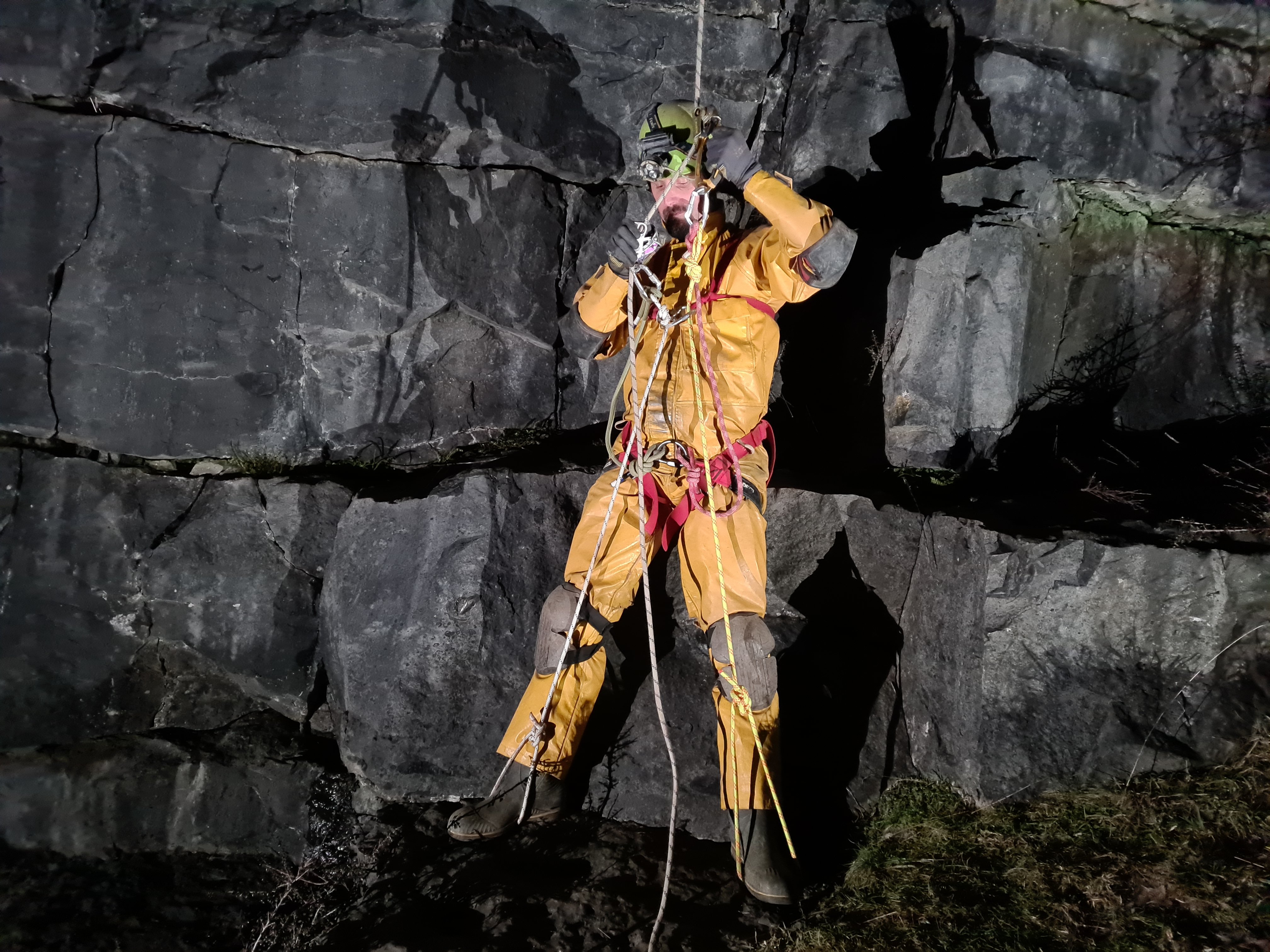
It uses two top jammers, each with a footloop connected to their respective foot. The top jammers are both positioned in front of your face with the length of the footloops keeping them positioned at slightly different heights. In order to avoid falling backwards, the footloops are passed through a carabiner that is clipped to the chest harness. It is not possible to rest in any convenient manner, so in current usage, safety cords are normally added to both top jammers. The sit harness plays a secondary role for safety only. The chest harness is essential for support.
The UBSS variation of the Jumar system uses a chest jammer instead of the carabiner on the chest harness, which is connected to the main rope. The chest jammer is attached to the D-ring and chest harness. This holds the body against the rope and allows easy resting. A safety cord to one of the top jammers was suggested for use with this variation.
The Gossett system is a variation that threads the footloops through the sit harness instead of the chest harness, allowing the top jammers to be lowered a little. A chest roller should be used at waist level to make it easier. The chest harness is not needed. This variation allows a more comfortable resting position, but makes the stepping motion far less convenient. A chest jammer can optionally be added from the sit harness, connecting to the rope. In normal use, this does nothing but add friction, but it allows easy resting, and can be considered a safety feature (but safety cords can provide both benefits, without adding friction). It also makes it possible to disconnect one top jammer to get past a lip, while still maintaining two points of contact. For this purpose, a lever cam ascender would normally be used.
This system was invented by Austrian mountaineer Karl Prusik, published in 1931, and reprinted in 1932. (Unlike his other prusiking re-inventions, such as the Prusik knot, he was actually the first to use this system.) His developments came shortly after his club had published details of the Gérard Alpine technique, and it was almost certainly derived from that, though he failed to credit the source, and basically plagiarised a lot of the work in his article. Karl Prusik's description used Prusik knots with long footloops using an overhand noose to attach to the feet, passing through a rope tied around the chest and shoulders as a chest harness. The sit harness was not needed. The footloops could be shortened to thigh level if needed, to pass awkward overhangs. This system can be seen again using differently styled footloops in Knots for Mountaineering, by Phil D. Smith, first published in 1953 in the USA, but with no chest harness (which seriously risks falling) and the Prusik knots in front of the chest. The recommendation there was to use two separate ropes so that the footloops could be the same length, without the Prusik knots hitting each other (though stretch in the rope would make this very difficult to use in reality, except on extremely short pitches). The Jumar system was then suggested for mechanical ascenders in 1958 by Adolph Jüsi and Walter Marti, who ran the company Jümar Pangit in Reichenbach, Switzerland. It was intended to be used with commercially produced mechanical ascenders, Jümars (later spelled Jumars), which were sold by them. They almost certainly did not invent it themselves, and likely suggested it because mountaineers were already using it. The name was then applied to the system, even though it was not actually their invention. It was probably first used for caving in Biolet Cave in the Grenoble region of France in the early 1960s, then later in the USA around 1965. The Jumar system was poorly depicted in the British Descent magazine issue 10 in 1970, without showing that a chest harness was needed. The UBSS system was created by the University of Bristol Spelaeological Society during an expedition to Slovenia in 1972. American caver Jim Gossett created the Gossett system as an adaptation of the Jumar system that reduced the strain on the arms and allowed resting, using mechanical ascenders and a chest roller at waist level in 1977, inspired by the chest rollers that had been used with the Mitchell system. American climbers started to use the obviously dangerous variation without a chest harness, and also often without any safety cords either! They refer to it as "jugging" due to the jug handles of the ascenders that they use for it. Its main use is when ascending a steep slope, due to the extreme upper body strength required to use it on an overhang. This same approach had been used while British cavers were experimenting during the 1972 expedition to Ghar Parau in Iran.
This history section only covers the Jumar system. This article also has a detailed history of many of the other devices and techniques that are used for vertical caving.
<< Mitchell system, Mitchell rig, Mitchell three phase system (in Mitchell system mode), Cuddington three phase, stair step prusik | Personal SRT gear >>
This page is not intended to be viewed this way, please load the entire article. This version exists only to make it easier for search engines to understand the contents.
{kind=link}