
Vertical caving terminology and methods > Personal SRT gear

The devices used to prusik, which can grip and release the rope as needed. Commonly used in pairs (typically a top jammer and chest jammer for the frog system) to alternate which one is gripping the rope, and which one is moving. Additional ascenders can be used to allow rope walking, or provide other benefits. Ascenders are generally considered to be the weakest part of any normal PPE rated SRT gear, and therefore at least two must have a secure connection to the sit harness at all times, in case one fails. (Many designs, many brands, many names.)
The vast majority of ascenders rely on a mechanical ratchet called an eccentric cam to clamp the rope when it moves through them in one direction, and release it in the other. The majority of ascenders use small metal teeth to ensure that the movement of the rope causes them to clamp the rope reliably, with a spring that pushes the teeth against the rope. This causes no damage to the rope during normal use, but can make them dangerous to use in a shock loading situation (such as when self belaying), as they can tear through the rope's sheath. Many cavers, in Britain or North America, used to call these Jumars, after the Jumar ascender, which was the first one to use that approach with a single eccentric cam.
Older designs, and a minority of modern designs rely on the caver's weight to pull down on a lever, pinching the rope, known as a lever cam. In North America, these might just be called a "cam", which is confusing, since almost all ascenders use a cam of some kind. Lever cam ascenders normally cause less damage to the rope when shock loaded, but often fail to grip on muddy ropes. They can bend the rope quite hard when loaded, and long term use can cause ropes to wear out a little faster. This type of ascender must not be held in the hand while they are gripping the rope, as a downwards force on the body of the ascender can cause them to disengage. Some lever cam ascenders need a sharp downwards pull to make them grip the rope in the first place, which can make them a little harder to use. However, this feature means that they can often be moved down the rope very easily when not loaded, which is more convenient than eccentric cam ascenders for some purposes, such as reverse prusiking. These devices may be designed specifically for catching a fall, and are sold as fall arresters, rope grabs or rope clamps when aimed at rope access usage, even though they are essentially just ascenders.
Some designs, such as the Petzl Tibloc, rely on teeth to pull the device into a position where it compresses the rope against something, such as a carabiner. These risk damaging the rope more easily, as the teeth are an integral part of how they work, rather than using clamping force, with the teeth just to make sure the cam moves properly. They are generally not suitable for frequent use, because of the risk of damage to the rope. Many types of progress capture pulley can also be used as an ascender. These typically use a very small eccentric cam, but they often rely on the teeth to grip the rope much more than a standard eccentric cam ascender, and they often bend the rope significantly during use, so they are not as gentle to the rope as dedicated ascenders. However, they are sometimes used as an emergency ascender. Both the Tibloc and progress capture pulleys are very inconvenient for some manoeuvres, such as reverse prusiking. Most need to be completely removed from their carabiner to remove them from the rope, which risks dropping them when performing manoeuvres, so they need a keeper cord to catch them, but this must be done in such a way that it does not interfere with their normal operation.
There are also some devices that can double up as an ascender and descender, which may be known as a multicender in arboriculture. The most basic ones are simply an ascender and descender bolted or welded together, but dedicated devices are usually a single device that can perform both functions depending on how they are configured. These never really caught on due to their complexity, and excess of moving parts, often with adjustments needed for each different rope type or diameter. They do not normally cope with the mud and changing conditions they would encounter in caves. Some do not even cope with a change between dry and wet ropes, and may need adjustments to be made every time. Their use is mostly confined to the arboriculture world where mid-rope changeovers are very frequently required. Examples include the Rock Exotica Unicender, the Notch Rope Runner series and the Rock Exotica Akimbo, which are simply unusable for caving because they cannot cope with the variety of ropes used there, and all wear out far too quickly when used with muddy ropes (even with clean ropes, they wear out far more quickly than caving devices). Some of them can only be threaded onto the end of a rope, such as the Petzl Zigzag.
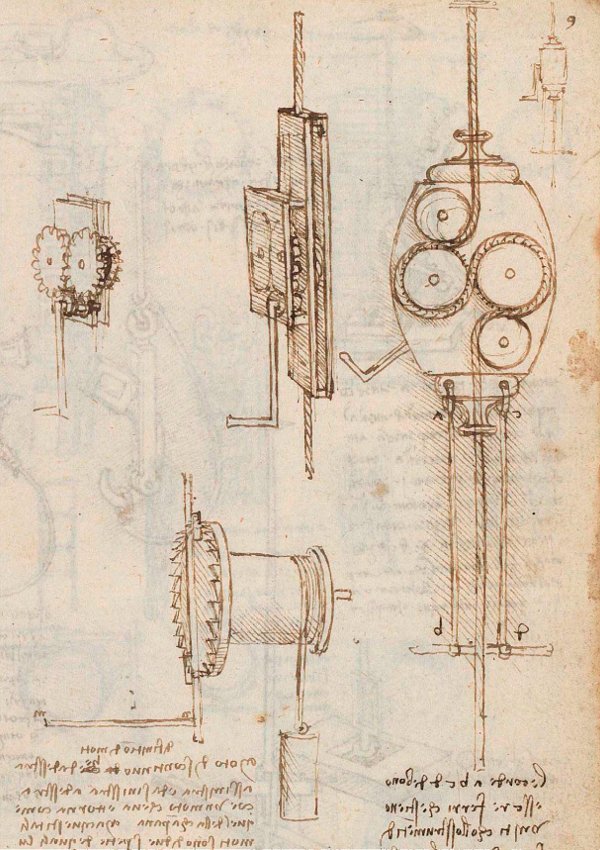
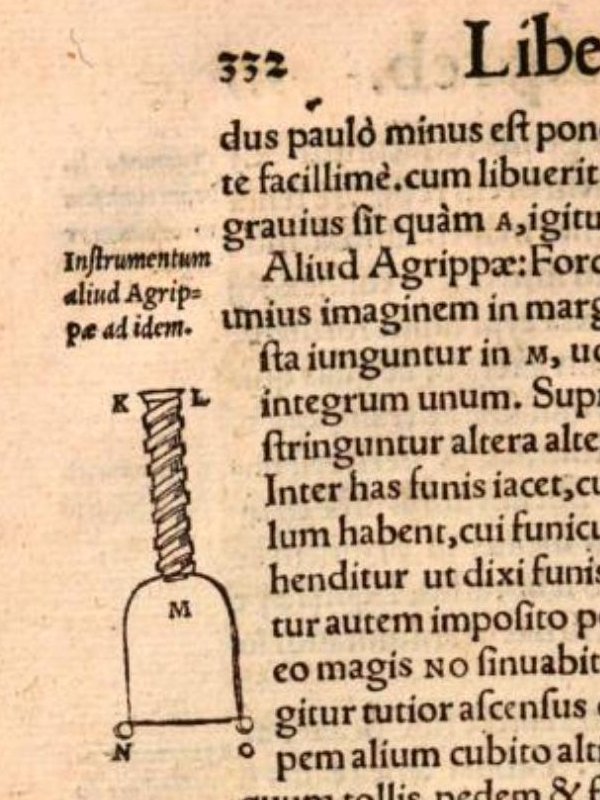
Between 1495 and 1497 in the Holy Roman Empire, now Italy, Leonardo da Vinci designed a mechanical ascender that used a rotating handle, which turned pulleys that gripped the rope as it passed around between them. A ratchet prevented it from rotating in reverse. It was not used with any standard prusiking system, and like most of his inventions, it was probably never built. In 1550, polymath Gerolamo Cardano published a book called De Subtilitate Rerum (On The Subtlety/Intricacy/Finesse Of Things) in the Holy Roman Empire (now Italy), which included details of ascenders which he attributed to Heinrich Cornelius Agrippa von Nettesheim (whose first name might be written as Henry or Henricus), from the Holy Roman Empire (now Germany). (An English translation of a later edition is available, but it gets some of the important details wrong.) The design is very similar to a pair of tongs or pliers, and they were referred to as "forcipes" (a pair of forceps) in Latin. The grips were shaped the same as the twists of a hawser laid rope and interlocked into that shape when closed, so that they could hold very firmly onto the rope, and they would not have worked as well on a smooth, modern rope. The handles had a piece of rope joining them, and stepping on that piece of rope would pull the handles together, forcing the grips closed, and heavier users would cause them to grip even harder. Their design was probably inspired by the stone tongs used on cranes to lift heavy rocks, as they function in exactly the same way. They were intended to be used with the two ascender variation of rope walking, with one ascender strapped to each foot. They were not designed to be slid up the rope, however, and had to be taken off the rope, moved upwards manually, then reconnected to the rope higher up, which would have been incredibly fiddly, and risked dropping them. The date of their creation is not specified, but it was probably 1520-1530, when Heinrich Cornelius Agrippa von Nettesheim was adding details of how to cast metals to his book series De Occulta Philosophia, and definitely before his death in 1535. He served in the Spanish and Holy Roman Empire militaries from 1508 to 1515, was an academic lecturer from 1509 to 1519 and continued with academic research afterwards in many parts of the Holy Roman Empire. He was established as a polymath, well known for having a great interest in science, mechanics, natural magic, alchemy and philosophy. He probably developed them simply out of curiosity, believing them to be useful for rope access. Knowledge of them, however, seemed to remain entirely within academic circles, and they were not described as being used anywhere. Gerolamo Cardano stated that he had actually seen the physical devices, so they were not just theoretical.
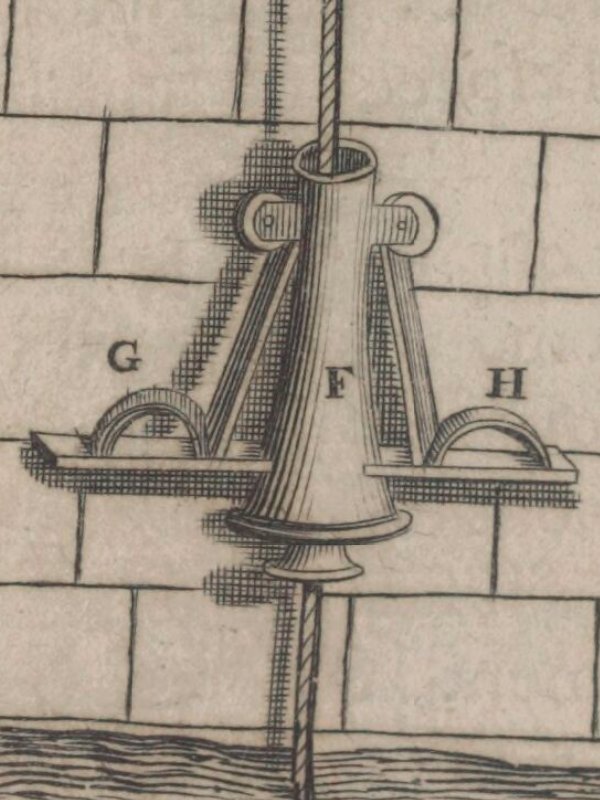
Most of the early standard ascenders were clamping jaws, which were essentially a pair of opposing lever cams, pushing at the same time from opposite sides of the rope. This meant that they needed to be pushed downwards on both levers together, with the same amount of force. The majority of these were therefore expected to be strapped to the feet or held in the hands, with both feet being used together, and both hands being used together. The earliest known clamping jaws ascender that was designed to slide up the rope was created by French inventor Nicolas Grollier de Servière, which he called pincers or pliers ("tenaille" in French). The exact date of its invention is not recorded, but it was during his retirement which began in 1642 and ended with his death in 1689. It is likely to have been shortly after obtaining the 1647 French translation of a book by Galileo Galilei, which inspired the inventor's research into rope access. The details of this ascender were then included in a book by his grandson Gaspard II Grollier de Servière in 1719, along with instructions for its use, which show that it was intended for use with the hands and feet system. There was only a single ascender, designed to be used as a foot jammer for use with both feet at once. Its purpose was to ascend a castle wall during an invasion, or ascend into the window of a tall building.
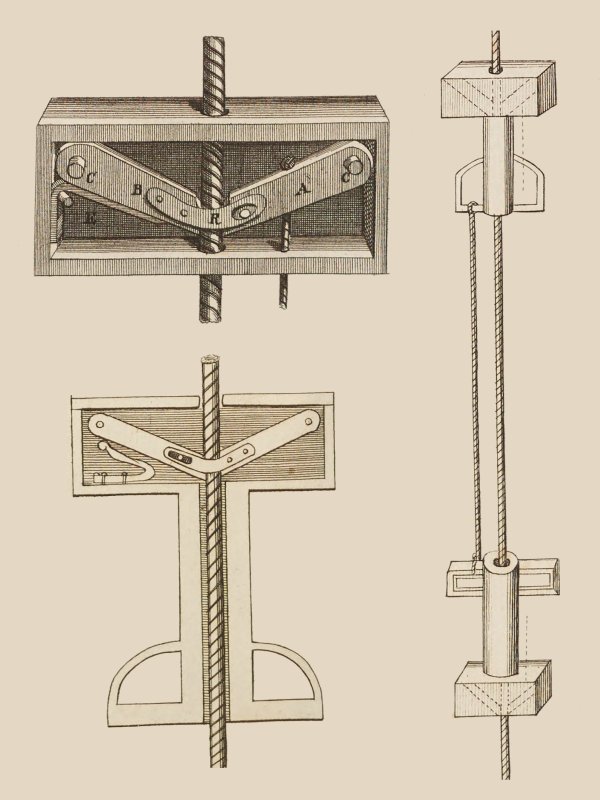
In 1700, the book "Recueil de plusieurs machines de nouvelle invention" was published, containing the mechanical research of Claude Perrault, a French physician and architect. One of these was a clamping jaws ascender called "Main" (French for "Hand") or "Analemme" ("Analemma"). This was intended to be used as part of a crane, to provide progress capture for a pulley. He had died in 1688, and he was probably working on the book at the time of his death. Unlike other clamping jaws designs, the two jaws were linked, so that they moved at the same time. A spring forced them to make contact with the rope, and the weight on the ascender would then result in them clamping the rope. This meant that they would not need both hands to be used at once, or both feet to be used at once, and could have been used for any prusiking system, if only this ability had been realised. In fact, this approach is extremely close to how a modern sprung eccentric cam device works, but using two opposing eccentric cams instead of the modern single cam. In 1725, German engineer Jacob Leupold from the Holy Roman Empire (now Germany) added pairs of handles and stirrups to Claude Perrault's ascenders, and used them with the hands and feet system, adding a tether between the ascenders to avoid accidentally dropping the foot jammer. Reverse prusiking required pulling a string or pushing a lever to open the clamping jaws. The spring made bottom weighting difficult, and the suggestion was to hang a rock on the bottom of the rope, but the lever would also have worked. Jacob Leupold also recommended a modification to Nicolas Grollier de Servière's ascender, to make it grip the rope with more force. Both ascenders were suggested as a way to escape a fire using a rope, by reverse prusiking.
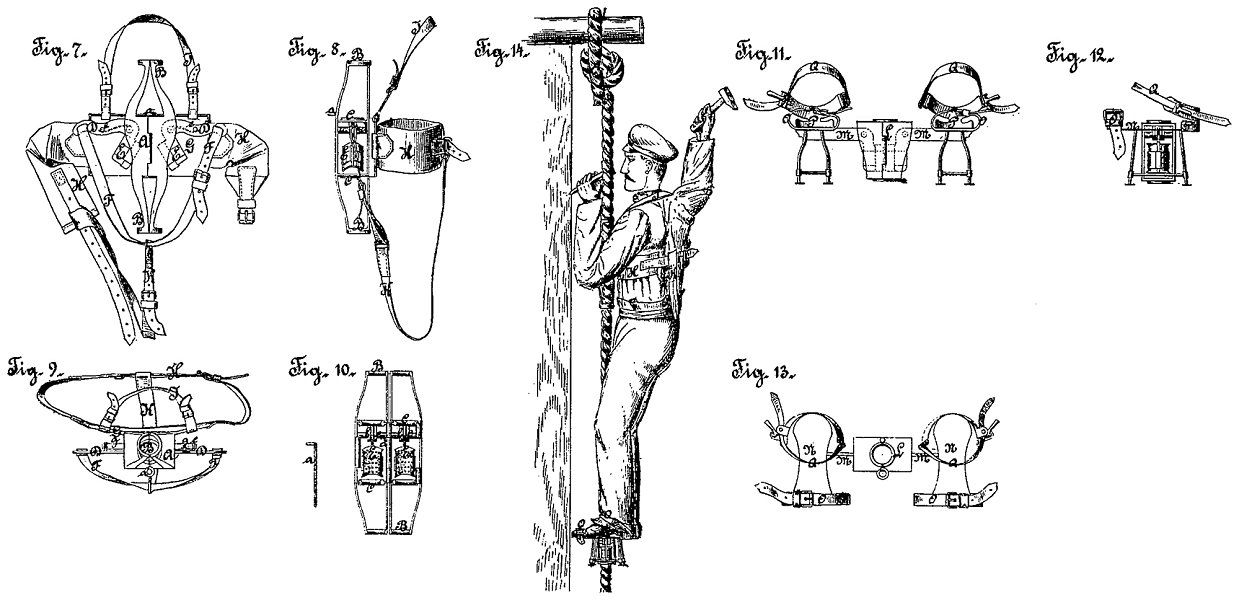
Another set of clamping jaws ascenders were patented in 1878 by German inventor Ed. von Mengden, presumably inspired by the "tree climbing spikes" or "spurs" worn by arborists, and trying to come up with something less damaging. They were not designed to be used for ropes, and had a highly complex width adjustment for wide poles such as telegraph poles and observation poles, or for pioneers climbing the ramparts of fortresses (this is not a joke!). These were intended to be used with the hands and feet system. In 1879, the same inventor updated the design, and added a second design for ropes, with one in a large housing strapped to the chest as a chest jammer using a full body harness, and one strapped to the feet, which would be used with the inchworm system. In 1885, American George M. Heath created a simplified ascender for cables based on the clamping jaws approach, intended for use with the hands and feet system, but without any safety measures. In 1893, Swedish inventor Anders Wilhelm Lewin created a rope grabbing device based on the clamping jaws principle that also featured a descent lever, so it could be used as both an ascender and descender. American William E. Burke patented an ascender in 1897 that used the clamping jaws approach, where the clamping force pushed the rope sideways between two rings, holding it in place with shear stress. It was intended to be used with the hands and feet system, but without any safety measures, and without any ascender held in the hands; the hands had to hold the rope directly. Apparently, this was a "useful improvement".
New Zealand inventor Robert Cockerell (who specifically wrote as a British subject!), patented the first lever cam ascender in 1902, which looked almost identical to the Singes Mécaniques (which would appear later), and could function on either ropes or poles. It worked as an ascender when pulled in one direction, and a friction descender when pulled in the other direction (where it did not provide enough grip to be an ascender). It was intended to be used with the two ascender variation of rope walking, with one ascender strapped to each foot. It was almost certainly created in 1901 or earlier. In 1902, American inventor Charles E. Knop patented an ascender based on the clamping jaws approach. It was intended to be used with the hands and feet system, without any ascender for the hands, and without any safety measures. This was once again claimed to be a "useful improvement". In 1903, British inventors P. and W. MacLellan and James Dougall patented the same basic idea, except they also strapped a large plank to the feet, covered in paint pots, that the user was expected to lift upwards with their feet, while holding on to the rope with just their hands! It also featured a lever that could be used to turn it into a descender. In 1904, a lever cam device was patented by Austrian locksmith Michael Gayer, which he called a "clamping sleeve for climbing devices". This was sold as a "climbing device" by F. Turczynski Jagd- und Touristen-Asrüstingen, a mountaineering shop in Vienna, Austria, the city where Austrian mountaineer Karl Prusik lived, run by a member of the Wiener Alpenklub (Vienna Alpine Club), which Karl Prusik was also a member of. The design had a very limited range of rope sizes which it could work with, and used a fiddly bolt and wing nut to close a hinged section around the rope, which would have been very easy to drop by mistake. It was advertised only as a fall arrester in Austrian mountaineer E. Fink's Touristen-Vademekum publication in 1904, for self belaying when climbing up or down, for climbers, quarry workers, miners, construction workers, roofers and plumbers. In 1910, American inventor Iver J. Westad re-invented clamping jaws, but very much simplified this time, intended to be used with the hands and feet system with two ascenders on a rope. German mountaineer H. Sixt proposed a lever cam device, which German mountaineer Franz Kröner then improved and manufactured in 1911, called a "climbing lock". It was intended to be used as a self belaying device while abseiling, but could have been better used as an ascender. Karl Prusik claimed in 1931 that the "climbing locks" could not be used when the ropes swelled because they got wet, and while he did not clarify which devices he was referring to, it was probably the devices made by Michael Gayer and H. Sixt.
In 1913, Austrian inventor Johann Machek patented lever cam devices, with one strapped to the feet, and one attached in front of the body, with a boatswain's chair hanging off it. It was intended to be used with a variation of the inchworm system, requiring foot tilts to disengage the foot jammer. It was intended to be used by exterior decorators, and is incredibly similar to the later design by Antoine Joseph Marius "Paul Cans" Barthelemy, which received much more attention. In 1913, American "inventor" Linn Fenimore Cooper invented perhaps the most simple ascender, which worked by bending the rope sharply as it passed through a narrow gap, and could be described as little more than a board with a hole in it, but apparently it was enough to earn a patent! You could patent a board with a nail in it, if you manage to get there early enough. Not only would this rapidly damage the rope, but it also would have been impractical to use more than one at a time. It was intended to be used with the hands and feet system, without any ascender for the hands, and required careful manipulation using the feet to move it up the rope while gripping directly onto the rope with the hands. Amazingly, it does not appear to have been a joke, and someone must have thought it was worth paying for the patent. Also in 1913, American engineer Egbert Whitney patented clamps for cables that would use gravity to force a wedge to close on a cable. When used in pairs, these could be used as ascenders for scaffolding platforms. In 1919, German Heinrich Schnurer re-invented simple clamping jaws with a chest harness for safety, intended to be used with the hands and feet system.

The first mechanical ascender intended for caving was a prototype lever cam device created by French caver Léon Pérot in 1920. In the same year, Antoine Joseph Marius "Paul Cans" Barthelemy invented the lever cam Ouistiti (marmoset), intended as a way to paint buildings, which was revealed at the start of 1921 by ascending to the first platform of the Eiffel tower. He also used them to hang things on the rope, particularly for bottom weighting. While most lever cam devices simply trap the rope, his worked by bending the rope sharply between two rings where it was held straight, which would probably cause a lot of shear stress on the rope. The first devices actually used by cavers were French caver Henri "Kiki" Brenot's Singes Mécaniques (mechanical monkeys), which were made in 1929, originally intended for mountaineering, and first used underground in the Félix-Trombe cave system in the French Pyrenees along with Pierre Chevalier in 1934. These can be seen in Henry P. Guérin's 1944 book "Spéléologie, manuel technique; Le matériel et son emploi Les explorations", and were virtually identical to the Gibbs ascender. They were inspired by something that French well diggers had been using, which was presumably something based on Robert Cockerell's ascenders. Alpinist Magazine says "the device consisted of two pieces: a curved metal plate that held the rope and a removable L-shaped camming arm fixed to the plate by a pin", where a strap or belt could be "attached to the camming arm through a hole at its top". The main criticisms were that they were fiddly to use and damaged hemp ropes fairly quickly. Henri "Kiki" Brenot also developed the Frein de Descente descender in about 1930, which had a safety brake. The safety brake was almost identical to a modern eccentric cam ascender, using gravity instead of a spring to make it engage with the rope, and could have been used as an ascender, if only this ability had been realised. It would have been far more easy to use than the Singes Mécaniques.
The first modern type of sprung eccentric cam device was the Jümar, which became commercially available in 1958, at least 270 years since the Main (Hand) first used a sprung eccentric cam! This is often stated as being the first mechanical ascender, or the first commercially available ascender, but neither of these is true, as there had been several commercial ascenders available for as much as 80 years at that point, and mechanical ascenders had been in use for around 400 years. However, Jümars were the first commercial mechanical ascenders known to be used for caving ("climbing locks" had already been used for climbing). Adolph Jüsi was studying eagles for the Swiss government, and had asked Walter Marti to develop the ascender for him so that he could reach them. Together they ran the company Jümar Pangit in Reichenbach, Switzerland, which sold the Jümar. The name Jumar is sometimes used for all ascenders as a result. The name was spelled Jumar as early as 1960 in English speaking markets, and they were sold that way when sales became official in those countries. The name was also pronounced as an English word in those markets, instead of a German word. French caver Bruno Dressler then modified these in the Grenoble region of France to remove the handle in 1959, and made a relatively small ascender in 1963, originally known as a Schtroumpf (Smurf). It was then produced for others to test in 1964. These variations are the basis of almost all modern ascenders. German company Salewa released the ridiculously minimal Heibler lever cam ascender in 1963. Americans Wegstein and Danhof (presumably cavers) described a twin lever cam ascender from America in 1963, which is basically a clamping jaws ascender.
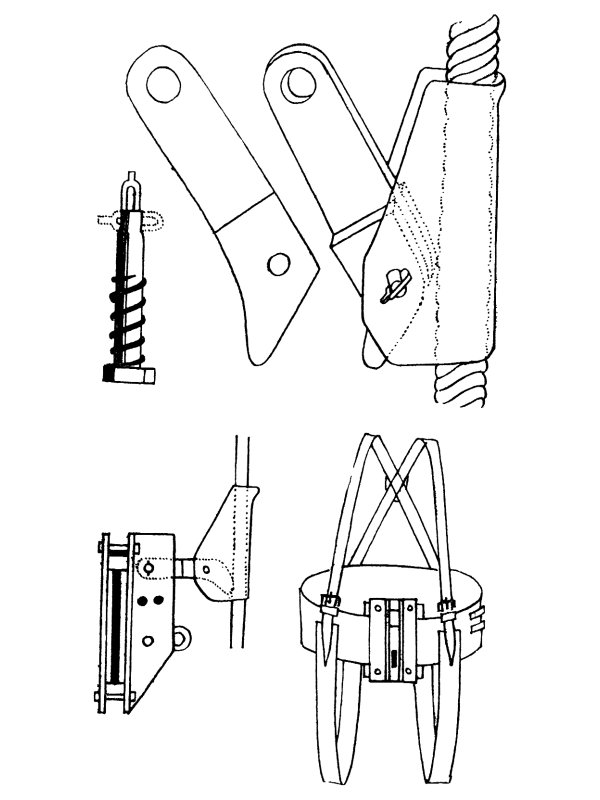
In 1963-1964, the Light Engineering group within the British South Wales Caving Club developed ascenders for cables, based on a commercial emergency cable clamp. These operated based on the idea of a long, narrow parallelogram, where changing the angle of the ends pulled the two long sides closer together, trapping the cable between them. The leverage was created by a lever attached to the ends, with a spring that pulled it closed, while the weight of the person then pulled the lever harder. The cable ran in a groove in each of the two sides to keep it between them, with a roughened surface so that it would grip the cable, and be more inclined to grab it. This is somewhat similar to a lever cam device, but with the leverage applying over a much longer length. The spring cause it to scrape quite roughly up the cables when being slid upwards, and poor quality metals would quickly be worn away. One of the ascenders had handles sticking out the sides for holding on to, and the other had foot plates for standing on, so it functioned as a mar-bar. With the handled one, the lever could be pulled downwards to release the grip on the cable, and on the other one, one of the foot plates could be tilted forwards to pull the lever downwards for the same reason, so that reverse prusiking was possible. Americans Robert E. Henshaw and David F. Morehouse (presumably cavers) made a lever cam device called the Climbing Cam in 1965 that was very similar to the Singes Mécaniques but was an independent design, followed by Dwight Deal's Infernal Machine, and Pete Lindsley, who all copied each other (all presumably cavers).
American caver Charles Gibbs created the Gibbs ascender some time around 1966. American caver Jack Speece described the Bat Climber in 1968, another clamping jaws ascender. American company Gibbs released their ascender in 1969, and despite being an almost direct copy of the Singes Mécaniques that people previously complained about, they were a big success. This was mainly because the three Gibbs version of rope walking was created especially for them, and had been proven to be much faster than the Jumar system which had been recommended for Jumars. Designs proliferated. In 1969, Clogwyn Climbing Gear released the first British commercial ascender aimed at mountaineering or caving, the basic Clog, affectionately known as a Clogger or Cloggar, which was based on Bruno Dressler's ascender. The French approach of using an ascender for self belaying while using ladders was described in Britain in the Westminster Speleological Group Bulletin Jan/Feb 1969, referred to as a brake-blocker, which is an early term for an ascender (bloqueur in French), but in 1970, Clogwyn Climbing Gear told Descent magazine that theirs was not suitable for that task, because it could be affected by mud, and fail to work. By 1970, Petzl had released the first version of the Basic ascender, which was based on Bruno Dressler's ascender, and it was already being advertised in the British Descent magazine edition 10 in that year. Carabiners were being used as emergency ascenders, using the Alpine clutch, which was created by Italian Franco Garda in 1970. After the British caving expedition to Ghar Parau in 1971, where the Jumar had been the most popular ascender, Clogwyn Climbing Gear released the handled Expedition ascender, possibly in the same year. During the 1970s, many people again experimented with combining the functionality of an ascender and descender into one device (rather than two devices bolted or welded together), such as the Bugat developed by father and son Bugat and Francis in 1974-1975, the Whillock Rope Climber made by British caver Martin Whillock in 1975, the French S.A.R.L. Voynett Tracson created by Denis Motte in 1978, and the British Dick Lawson Multiscender from the late 1970s. These never really caught on due to their complexity, and excess of moving parts, which rarely cope with the mud in caves. Petzl released the Shunt in 1972.
The rocker aproach to ascenders, now far more common with fall arresters, was developed in 1975 by Russian mountaineer Виктор Алексеевич Козлов (Victor Alekseevich Kozlov), as an approach that worked more reliably on frozen ropes. The up rope pulls on one end of a rocking lever, trapping it at the other end of the lever. It was then refined in 1980 with the help of Борис Бергандович Паникаров (Boris Bergandovich Panikarov) and Сережа Мамаев (Seryozha Mamaev), and made for friends as the Капелька ("Kapelka", meaning droplet). A handled version was made in 1983, which could also be used as an extremely clumsy descender by threading the rope through the handle. They were commercially sold under the brand Ural-Alp in Russia in 1993 and USHBA internationally from 1995, at which point the idea became widely known, and the approach started being used for fall arresters. In 1985, British caver Jim Roberts created a cycling device for prusiking on free-hangs, literally a bicycle arrangement with rotating handlebars and pedals on an upright frame. For some reason, this never caught on, even after being demonstrated in 1991 and 1992. American arborist Daniel F. Brennan created the Arborist Cinch in 1987, a combination ascender and descender.
Progress capture pulleys (pulleys with an integrated ascender cam) started being made by the late 1980s, and part way through the 1990s, they started being made with a design that allowed them to be used as an ascender. The Ural-Alp Hauler, released in 1994 or 1996 (depending on which website you read) was the first with the right design, but could only be used by people weighing less than 25 kg, such as small children. British company Wild Country released the first miniature ascender, the Ropeman, in 1996. Petzl released the Tibloc in 1998. By 1999, the first prototypes of the Petzl Mini Traxion had appeared, which were the first known progress capture pulley to be strong enough to be trusted as an ascender, as well as being designed in a way which allowed that. Combination ascender and descender devices became popular in the arboriculture world, where the Rock Exotica Unicender was created by American arborist Morgan Thompson in 2005, which uses a series of hinged metal plates to weave the rope through increasingly sharp bends, and clamp it between the plates in much the same way as a pair of scissors. This is the same basic approach that Antoine Joseph Marius "Paul Cans" Barthelemy had used. The Hitch Hiker was created by British arborist Paul Cox (while based in the USA) in 2012, an arborist device that relies in part on having a friction hitch above it. American arborist Gordon Svedberg made the Bulldog Offset Ascending Rack in 2012, which is an obvious copy of the Unicender. The Singing Tree Rope Runner was announced by American arborist Kevin Bingham in 2013 then sold in 2014, the Bulldog Bone was created by American arborist Gordon Svedberg in 2014 and the Rock Exotica Akimbo was created by American arborist Jaime Merritt in 2014, all of which are very similar to the Bugat, designed for arborists. Petzl patented the Zigzag in 2010 and marketed it at the end of 2012, but it was not actually released until 2013.
This history section only covers ascenders. This article also has a detailed history of many of the other devices and techniques that are used for vertical caving.
<< Braking carabiner | Top jammer, top ascender, hand jammer, hand ascender >>
This page is not intended to be viewed this way, please load the entire article. This version exists only to make it easier for search engines to understand the contents.