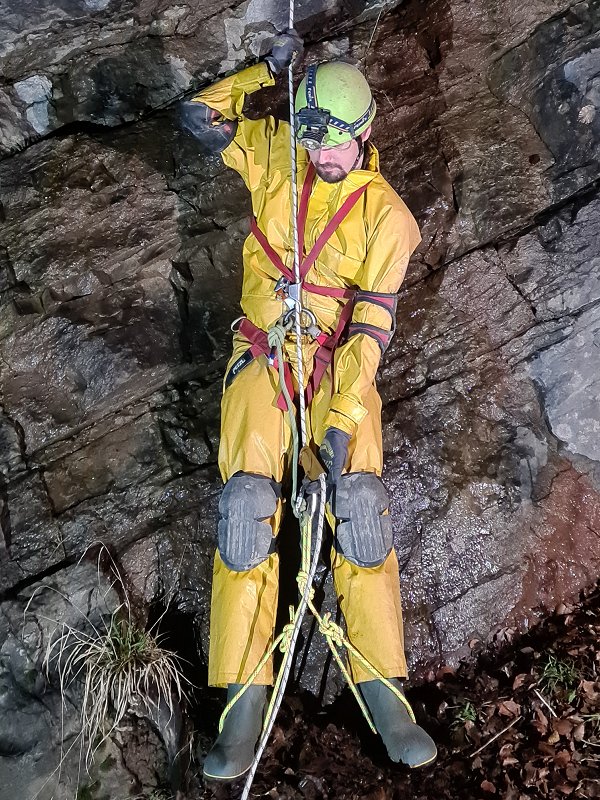
Vertical caving terminology and methods > Prusiking systems, prusiking methods > Sit-stand systems
An uncommon sit-stand system for prusiking which is half way between the frog system and the Texas system. It ends up similar to the inchworm system, but is significantly easier to use for some manoevers. In its original format, it lacked any safety, but it is easy enough to add it. The legs perform most of the work, and the arms are used for balance and pulling up the lower jammer. However, it allows a very limited range of motion, and as a result the gain feels a little limited considering the effort. Can be used for prusik loops, but the position of the lower prusik loop makes this somewhat awkward.
This is a reasonably convenient system for passing rebelays and deviations. It can be used for passing a knot while abseiling or prusiking, but the position of the lower jammer makes this more awkward while abseiling. Reverse prusiking is relatively easy compared with some other techniques. Bottom weighting can be done by looping the rope under one foot and pulling upwards with one hand. If using a Gibbs ascender (the type of ascender this system was originally created for), bottom weighting is not needed, as the ascender will effortlessly lift up if you pull up on the end of the ascender's lever. Mid-rope changeovers are possible, but a little clumsy because of the low position of the lower jammer. The positions of the ascenders does not leave much space for the lower jammer to move, so it is not possible to fully sit before standing. So although resting is comfortable, energy transfer efficiency is slightly lower than the frog system, because of the limited range of motion. One arm has to alternate between holding the rope for stability, and pulling up the lower jammer, which is less convenient than the frog system. This system will temporarily leave the caver in an uncomfortable situation if the chest jammer fails, as after a significant loss of height, they will be held at an awkward angle until they can remove their feet from the footloop.
Uses a chest jammer and a lower jammer with a footloop. A safety cord was not originally used, but it needs to be used for the lower jammer, so that the lower jammer can take over if the chest jammer fails, and to avoid dropping it during manoeuvres. This makes it the equal simplest of all the systems in terms of equipment (along with the frog system). The sit harness plays an essential role both as a main support and for safety. The chest harness is only used for efficiency, and was originally used only for comfort. A longer safety cord also makes it possible to pull up the lower ascender using the safety cord, so it can be put lower down, increasing the range of motion and efficiency. However, that then makes it much harder to reverse prusik, and harder to perform most manoevers.
The portly prusik recreates this system with a slightly different arrangement, intended specifically for larger cavers. A shoulder jammer is used instead of a chest jammer, so that the stance can be more upright. A double footloop is used to allow the feet to be further apart (the double footloop was also used un the original version).
An incredibly silly variation can be used to gain a tiny bit of extra height per sit-stand cycle. While this could be used with one foot in a single footloop, its entire purpose is a performance gain, so it makes sense to use both feet in a single or double footloop. The chest jammer can be connected to a mobile carabiner that can slide up a very tight tether between the chest harness and sit harness. After standing and lifting the chest jammer as high as possible, rock backwards upside-down, slide the chest jammer down the tether closer to the harness. While upside down, pull the lower jammer all the way up until it touches the chest jammer. Rock back upright, and stand up, to repeat the cycle. Not only does this look quite ridiculous during use, it takes extra time and far more strength to perform the rocking, which could have been more effectively used by performing two normal sit-stand cycles with a regular singe system. Nevertheless, someone actually developed and used this variation, and shared it with enough other people for it to end up in a book! Clearly, it was created by a monkey that got accidentally released into the hall at an American National Speleological Society convention.
This was the second system to be used for prusiking in a cave, having been developed between 1935 and 1944, probably by French caver Henri "Kiki" Brenot, and perhaps others such as Robert de Joly and Henry P. Guérin. It was described in French caver Henry P. Guérin's 1944 book "Spéléologie, manuel technique; Le matériel et son emploi Les explorations". It was intended to be used with the Singes Mécaniques (mechanical monkeys) ascenders. In that original format, it used a fancy full body harness (highly advanced for its time), and an oversized bracket to connect to the lever arm of the ascender. The lower jammer used either a single or double footloop to connect to one or two feet as needed. It was probably in use all the way until 1968. It is likely to have then been adapted into the frog system, with the lower jammer moved above the chest jammer, with a longer footloop, creating a top jammer. The system then fell out of use in Europe.
Robert "Bob" Thrun describes a recreation of this system for prusik loops as method 16 in Prusiking, 1973, but it was likely something that was created much earlier, probably before 1965, and almost certainly originated from the Gérard Alpine technique. The chest prusik loop connected to a chest harness, and the feet had a double footloop. Some time after the inchworm system was recreated in 1966, and before 1973, other users of that system modified it to remove the mar-bar and replace it with a lower jammer (or prusik loop) with a double footloop, recreated the singe system. They called it the number one Texas system, without realising it was something that already existed with a name. It was described in American Caves and Caving by William R. Halliday in 1974, but it is not known who developed it. Robert "Bob" Thrun described the rocking upside down variation as method 18 in Prusiking, 1973, but did not say who created it or when. It almost certainly was derived from the inchworm system (or at least, it only makes sense using handled ascenders, when testing - yes of course I tested it), and was intended for use with mechanical ascenders. The singe system was recreated again by Bruce W. Smith in 1983 as the portly prusik, as an adaptation of the Texas system, using approaches from rope walking.
This history section only covers the singe system. This article also has a detailed history of many of the other devices and techniques that are used for vertical caving.
<< Texas system, Texas inchworm style, Texas prusik, Texas rig, three phase system (in Texas system mode) | Inchworm system, inchworm rig, pogo stick method >>
This page is not intended to be viewed this way, please load the entire article. This version exists only to make it easier for search engines to understand the contents.
{kind=link}