
Vertical caving terminology and methods > Prusiking systems, prusiking methods > Step or rope walking systems, sit on the heels systems
The second most common system for prusiking, which is based on stepping, with its use largely confined to regions where indestructible rope technique is used, or in other disciplines such as arboriculture. The legs perform all of the work. The arms are not needed while prusiking. Cannot be used for prusik loops, but a small modification allows it to be, which is known as the Gérard Alpine technique.
This is very inconvenient for passing rebelays and deviations, and usually takes additional time to connect and disconnect from a rope, compared with the frog system. It is extremely difficult to use for passing a knot while abseiling, and still fairly awkward when prusiking. Reverse prusiking is exceptionally difficult due to the positions of the ascenders, but this is a lot easier with lever cam ascenders, since the foot can intentionally kick the lever, causing it to disengage. It is much harder if bungee cord is used to lift up the body of the lever cam ascender, as this prevents kicking the lever to make it disengage. Bottom weighting is done by looping the rope under one foot and pulling the rope upwards with a free hand. Despite its limitations, this is the most efficient in terms of energy transfer, and is therefore favoured on big hangs in places where indestructible rope technique is used. Having both hands free is convenient for pushing away from walls on sloping pitches, and makes prusiking much less tiring for the arms.
With smaller caves, this system can be a liability when moving through passages between pitches, as it has a vast number of straps, cords, bulky equipment, attachments and clips, some of which are relatively easy to damage, and it is far too easy to snag something. It takes a relatively long time to get the equipment on and off, so there is much more temptation to keep it on, even though it is likely to get damaged. Because of how much equipment needs to be worn, there is a common recommendation to avoid clutter by wearing only the descender while abseiling, or the prusiking rig while prusiking, but never both at the same time. This makes it extremely difficult to perform a mid-rope changeover in an emergency, and makes it much more likely that equipment will be dropped by accident while trying to perform the mid-rope changeover. However, if both are worn at the same time, a mid-rope changeover is relatively easy.
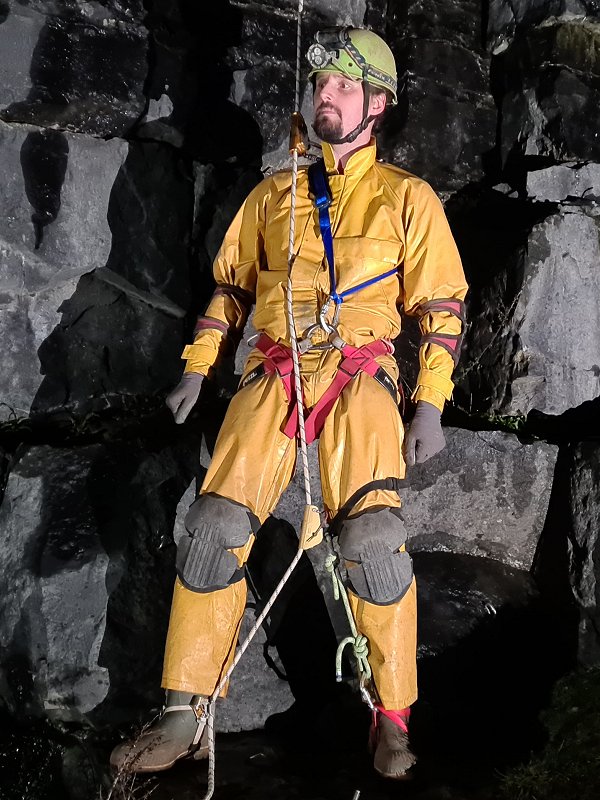
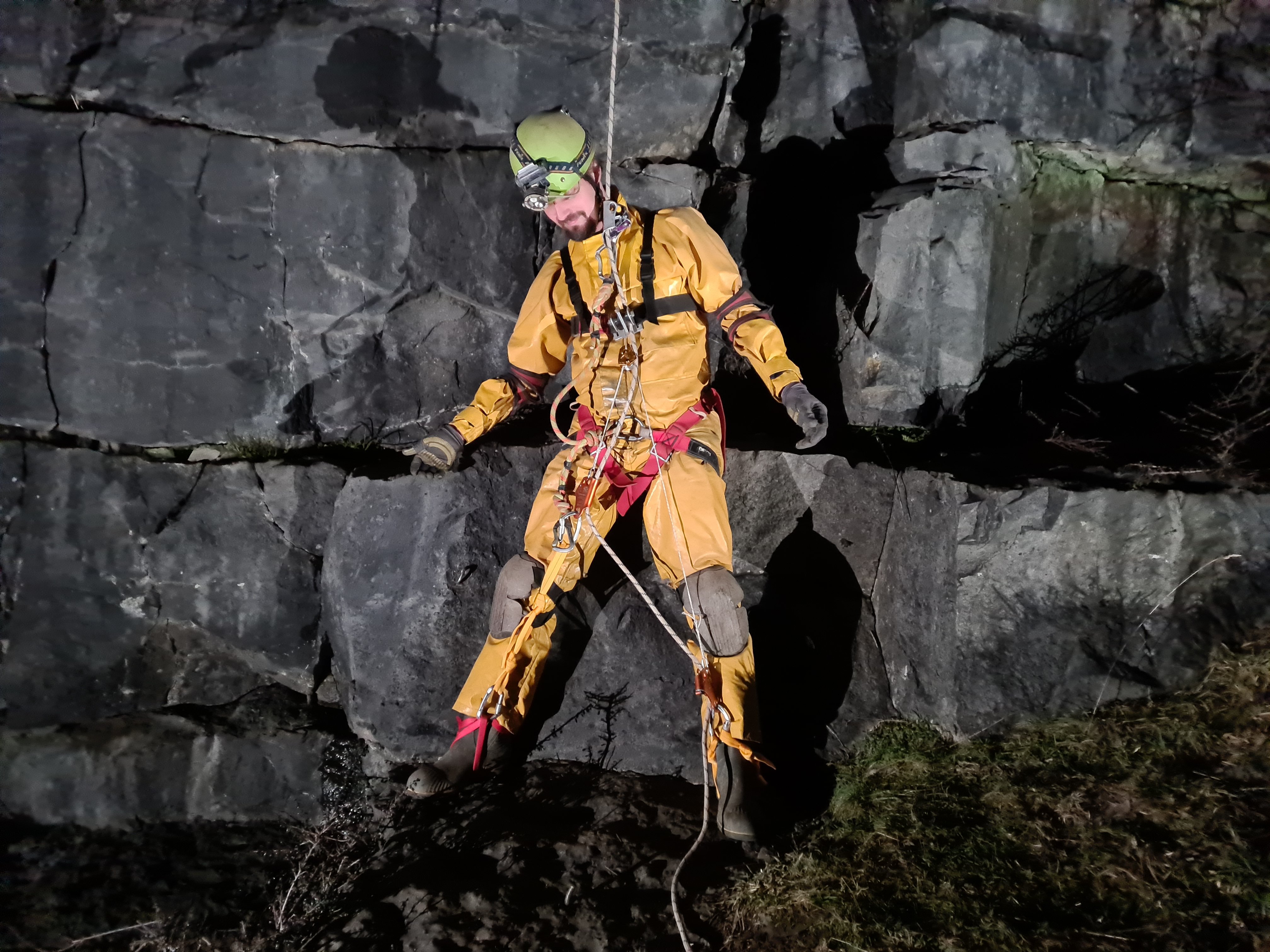
The modern configuration, known as the double bungee ropewalker or simply as rope walking, uses a chest roller for the rope, foot jammer and a knee jammer. Absolutely critical to the system is some very strong bungee cord, which is tied to the top of the foot jammer, all the way up through a pulley which is clipped sideways to the bottom of the chest roller (not one of the main pulleys of the chest roller), and back down to the top of the knee jammer. This bungee is responsible for holding the foot jammer upright, and pulling the knee jammer up the rope, with them both acting as floating cams. This also brings a very serious risk of a malfunction causing a fully stretched bungee cord to hurl a metal clip at high speed towards your face. A top jammer is normally used only as a quick attachment safety (to ensure that the centre of gravity can remain below it in case the chest roller disconnects) or to allow resting in a seated position. The top jammer also provides a convenient handhold that can be used if desired, and is very useful as a way to get over a lip when indestructible rope technique is being used. It also allows the chest roller to be completely disconnected if needed, with the top jammer used as an actual top jammer. The top and knee jammers are connected to the D-ring via a safety cord, but this job is often performed by the cows tails instead of a dedicated safety cord. The sit harness plays a secondary role for safety only. The chest harness is essential for support and for pulling up the foot jammer and knee jammer.
There are two older variations which are also known as rope walking, and were based on the use of Gibbs ascenders, or some other lever cam ascender. Both of them can be called a three Gibbs ropewalker system. They use a shoulder jammer instead of the top jammer, and the chest roller is not used. This causes more friction, and places equipment in a very clumsy position where it is likely to get snagged on clothing or hair. A Howie belt chest harness is suggested for this purpose, which also acts as a safety cord connection to the D-ring. The use of a lever cam ascender for the foot jammer removed the need for a bungee to that jammer. Originally, the knee jammer had a footloop, but the knee jammer was also strapped directly to the knee, using a painfully tight strap. This requires a clumsy motion to ascend (since a lever cam ascender of that type needs a sharp tug downwards to engage) and is much less efficient, but removes the need for a bungee to that jammer. In this configuration, it was originally just known as rope walking in Britain, but that term is now used for the double bungee ropewalker. However, the floating cam knee jammer (using bungee cord) made it more useful, and this is the second older variation, which was mistakenly known as a Howie rig in Britain, and initially referred to as the floating cam system in the USA. Both of these variations will leave the caver in a very challenging situation if the shoulder jammer fails, as there is then nothing to hold them upright. If the knee jammer is strapped to the knee, the knee jammer is forcibly held at a very poor angle, and some designs of ascender may disengage, dropping the caver down the pitch, a highly dangerous result.
The bungee cord could also be removed from the knee jammer, turning it into a lower jammer that needs to be manually lifted. This is known as the Murphy system, and brings in the inconvenience of the Mitchell system to rope walking.
The knee jammer could also be attached directly to the foot, so there would be two foot jammers, but then each foot needs to be kept at a different height, so one knee would always need to be bent, and the range of motion would be more limited, forcing the sit on the heels motion. This is a very early version of rope walking, and was known as cams on feet in the USA. A very dangerous further modification is to then remove the chest roller, top jammer, and shoulder jammer, and simply support the body with the hands on the rope, using just two foot jammers. This is the earliest version of rope walking, and should never be used due to the risk of falling backwards without any safety system.
As a variation, the chest roller can be swapped for a chest jammer, removing the need for a top jammer. The top jammer from the frog system can have its footloop shortened, and can be used as a floating cam knee jammer. A low strength foot jammer can be used. This replicates rope walking using parts of the frog system, and is known as the stair climbing method.
Rope walking was first used by Heinrich Cornelius Agrippa von Nettesheim in the Holy Roman Empire (now Germany) in about 1520-1530, but without using any ascender to support the body, and with the ascenders connected directly to the feet, so the hands had to hold the rope for support. To make it harder, the ascenders he used could not slide up the rope, and had to be disconnected from it and placed higher than the previous one, for every step. This meant reaching down below the upper foot which was holding the weight, disconnecting the ascender of the lower foot with one hand while sliding the foot out of it, and reconnecting it higher up, without dropping it. This was described in 1549-1550 by Gerolamo Cardano in the Holy Roman Empire (now Italy) as being possible to do safely, but in practice this would have been extremely difficult. French roofers and plumbers have been described using a knotted rope to climb buildings from as early as 1684, though the technique is almost certainly much older. It was later used by exterior decorators, and while it was not actually prusiking, it used the same basic approach as the Gérard Alpine technique, and would inspire prusiking techniques. Rope walking was then independently reinvented by New Zealand inventor Robert Cockerell in 1902, also without using any ascender to support the body, and with the ascenders strapped directly to the feet, so the hands had to hold the rope for support. A suggestion was to possibly also have an ascender in the hands, which would be redundant, and not actually improve the safety. However, at least his ascenders could actually slide up the rope, so this was a dramatic improvement.
Another variation of rope walking was created in 1920 and demonstrated at the start of 1921 by Antoine Joseph Marius "Paul Cans" Barthelemy to ascend to the first platform of the Eiffel Tower in France, using an ascender attached directly to each foot (limiting it to a sit on the heels motion), and a top jammer positioned above the head, connected to a boatswain's chair that acted as a sit harness. The design was so similar to that of Austrian inventor Johann Machek's variation of the inchworm system, that it clearly was just a copy of that, but using Robert Cockerell's approach of having two foot jammers. It is likely to have also been inspired by the existing method of climbing knotted ropes. The Gérard Alpine technique was then independently proposed in 1928 by E. Gérard in France, as a way to use the Gérard hitch. It uses the same ascender configuration as rope walking, with the foot powered ascenders brought within reach. Rope walking was then used by French caver Henri "Kiki" Brenot for use with his Singes Mécaniques (mechanical monkeys) ascenders in 1929, which he derived from the Gérard Alpine technique (according to Pierre Chevalier, Subterranean Climbers, 1951). The description is that one ascender supports the body, and one is attached to each foot. Each foot was raised one at a time while hanging on the ascender connected to the body, followed by standing to raise the body ascender, making it a sit on the heels motion. It was then the first prusiking system to be used for prusiking in a cave, by Henri "Kiki" Brenot and Pierre Chevalier in 1934, but was replaced by the singe system by 1944.
Inspired by the Gérard Alpine technique, Americans Robert E. Henshaw and David F. Morehouse (presumably cavers) recreated rope walking for their Climbing Cam mechanical ascenders in 1965, which became known as cams on feet, since both foot jammers were attached via very short straps to the feet, again limiting it to a sit on the heels motion. Their method used a fairly low chest jammer attached via a very short rope, and would have been relatively inefficient. It was adapted again for mechanical ascenders from the Gérard Alpine technique in America by caver Charles Gibbs and Cleveland Grotto members including Warwick Doll and Lee Watson, some time around 1966, who created the precursor to the three Gibbs ropewalker arrangement, with the knee jammer strapped to the knee, a foot jammer connected directly to the foot, and a prusik loop tied to a very basic chest harness instead of the shoulder jammer. It originally used a safety cord to the knee jammer, and the entire reason for having three ascenders was for safety, not for speed. During 1969, the configuration changed to replace the prusik loop with a third Gibbs ascender, at which point it was called the three Gibbs ropewalker. It became dominant in North America since the release of the Gibbs ascender in 1969, with cavers sometimes sacrificing safety for speed. It is very common for depictions to show it without a safety cord to the knee jammer, to the extent that this appears to have been the usual approach.
The Howie rig variant was developed by Kirk MacGregor in Toronto, Canada some time around 1970 (it set a speed record at the start of 1971), using surgical tubing instead of bungee cord to pull the knee jammer upwards, so it could be connected only to the foot instead of also being strapped to the knee. At the time, it was called the floating cam system, which confuses it with the another prusiking system. By 1971, British cavers already felt that the relatively simple three Gibbs rope walking had too many straps, and took too long to put on and take off in caves with multiple pitches separated by narrow passages. The chest roller was added by Kirk MacGregor some time between 1971 and 1974, borrowed from the Mitchell system. Americans Ron Simmons and Ward Foeller made the first dedicated chest roller for it some time around 1976, which was used with a fixed knee jammer. "Some years" before 1979, presumably around 1976, American caver David R. McClurg had started using a prusik loop as a quick attachment safety (which he depicted above the shoulder jammer of the Three Gibbs ropewalker).
In 1978, American Gary D. Storrick described a four Gibbs system, which was basically a standard Howie rig, but the floating cam knee jammer could be connected to a knee strap if needed (on pitches where the walls would snag a floating cam). The fourth Gibbs was attached to a strap, as a utility that could be looped over the wrist to pull over a lip, or around a foot as a foothold, or be clipped into the D-ring as an extra attachment when changing ropes at a tail. It was not an essential part of the main system, which was basically just a Howie rig, and could be used with any other system just as easily. (Of course, any system with a top jammer that has a safety cord and footloop already has something that can serve the same purpose.) This variation had been used for years at the time it was described. In 1979 Ron Simmons updated his chest roller, and added a quick attachment safety, as well as switching to a floating cam knee jammer. In addition to being a safety feature, the quick attachment safety also made it easier to rest, and allowed the chest roller to be disconnected when needed, using the quick attachment safety as a top jammer instead. It seems to have been an independent creation, and not inspired by David R. McClurg's safety prusik loop. By 1982, Ron Simmons realised that having a quick attachment safety allowed the chest roller and foot jammer to be disconnected, converting it into the Texas system.
The Murphy system was used by Russian cavers from Pluton Caving Club some time before 1981, as a method to climb cables, and considering the type of equipment used and its arrangement, it was almost certainly developed from rope walking. The foot jammer was strapped to the shin to stop it moving too much. A quick attachment safety was connected to a backup rope, instead of the cable. Rope walking developed into the common double bungee configuration in 1981, announced by American Kathy Williams. The Murphy system was recreated by American William Shrewsbury in 1987, combining parts of the Mitchell system and rope walking, which also had a quick attachment safety. In 1989, American Maureen Handler described how the pulley had been added to the double bungee configuration in 1987, without saying who had used it. She also mentioned that the system could be converted to a Mitchell system if desired, by adding a footloop to the quick attachment safety, and removing the foot jammer and bungee cord. The stair climbing method was originally described by Georges Marbach and Bernard Tourte in Alpine Caving Techniques, 2000, combining the frog system and rope walking.
In 2022 and 2023, American arborist Zach Riggs demonstrated a variation of rope walking using two ascenders, which a few commenters had also been recently using. The chest roller or shoulder jammer is removed, meaning that the rope has to be held in the hands for stability. Since this does not allow resting, the knee jammer is placed higher than normal, in front of the waist, so that the safety cord can be used to rest without losing so much height, and bungee cord is used to pull it upwards. With arborists, the main body support ascender is typically attached to the harness via a short tether instead of being directly attached like a typical chest jammer, so for this variation, that ascender is repurposed as the knee jammer, with the tether serving as the safety cord. There is no secondary safety of any kind, and only a single ascender can be trusted, which is fairly common with arboriculture. From a functionality point of view, this is the same as any of the previous uses of rope walking without a body support, and is really a regression, since it forces the hands to be used for stability, just like the very early versions of rope walking. It is therefore not treated as a new technique here, since it is really a ressurection of a much older technique, though it does now have the bungee cord, and while clumsy, resting is possible. Several people had already tried rope walking without a chest roller, and decided it was a bad idea, because it removes the hands-free operation, which is the major benefit of rope walking. However, the approach is used by some arborists, since the requirements there are different from caving. (One Japanese commenter claimed to have seen this approach in use about 20 years earlier in Japan, but that seems highly unlikely, since the devices needed for it had not been used in Japan until about 2012. Their comment is likely to be referring to the frog system with a foot jammer, not the actual system that was depicted. Arborist usage of SRT was only beginning in Japan around that time based on American and British knowledge, and even by 2019, Japanese arborist blogs and forums only talked about the frog system, three ascender rope walking, the Texas system and, without naming it, the inchworm system.)
This history section only covers rope walking. This article also has a detailed history of many of the other devices and techniques that are used for vertical caving.
<< Step or rope walking systems, sit on the heels systems | Gérard Alpine technique, three knot prusik, pygmy system, pygmy rig (sometimes mistakenly called the "prusik method" in USA) >>
This page is not intended to be viewed this way, please load the entire article. This version exists only to make it easier for search engines to understand the contents.
{kind=link}
{kind=link}